












高階DSC加持 智慧型SMPS大有可為
回歸主題,在多功能、高功率電源(DC-DC> 100瓦,AC-DC>250瓦)中,電源轉換反饋迴路的數位控制能克服類比方式的大部分限制。近來,設計人員開始將微控制器(MCU)添加到此類電源中,以實現監測、控制、通訊等功能,甚至滿足更重要、諸如電源程序化(Power Sequencing)、軟啟動(Soft Start)和拓撲控制(Topology Control)等功能。但由於缺乏低成本、高效能的技術,電源轉換迴路的全數位控制仍舊未能實現。
採用DSC設計智慧SMPS
為電源應用量身訂做、配備豐富周邊的新型數位訊號控制器(DSC),將協助設計人員以低成本的方法實現數位電源轉換。智慧電源需要基於計數器的脈衝寬度調變(PWM)模組、利用類比比較器進行反饋和協調的類比數位轉換器(ADC)採樣,以及能在一個時脈週期內完成的快速乘法運算。綜合上述功能,最新型的DSC能夠達成控制迴路軟體所需的高執行速率。
在開始電源設計之前,設計人員必須選擇符合應用要求的拓撲結構,例如升壓、降壓或者隔離轉換(順向型、半橋或全橋)。接下來,必須選擇硬開關(Hard-switching)或軟開關(Soft-switching)技術。軟開關技術造成的損耗較低,但需要較複雜的電路設計和控制,若利用專門支援軟開關功能的高階DSC即可有效簡化電路設計和控制方法。
開發智慧電源最關鍵的問題是選擇何種控制方法。電壓模式和電流模式控制是基於傳統類比智慧交換式電源供應器(SMPS)控制技術的兩種控制方法。
早期SMPS設計利用電壓模式控制其中斜波產生器(Ramp Generator)驅動電壓比較器的一個輸入,而來自誤差放大器/迴路濾波器的誤差訊號驅動另一個輸入(圖1)。結果得到完全基於電壓誤差訊號的PWM脈衝。這個方法雖然可行,但該電路存在兩大基本限制:一是沒有保護電路元件的限流措施,二為對輸入或輸出瞬變的回應緩慢。
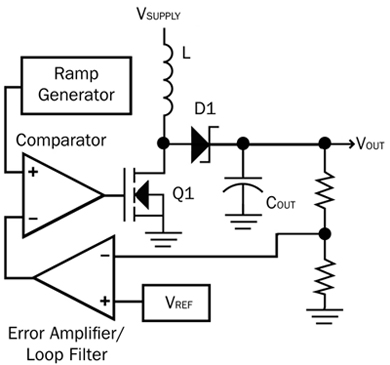 |
| 圖1 電壓模式控制 |
電流模式控制
隨著SMPS設計的日漸成熟,設計人員逐漸趨向利用「電流模式」,進行更有效、更安全的控制。該系統利用電感電流驅動的電流反饋訊號取代斜波產生器,造成一個峰值電感電流(Peak Inductor Current)直接受控於誤差訊號的系統。它消除由於電流過大導致的潛在電路故障(圖2)。由於電流模式控制調節了電感電流,電感「極點(Pole)」或延遲將能有效地從控制迴路中消除,從而改善系統的瞬態回應。
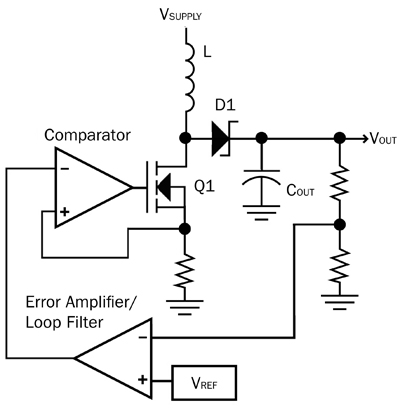 |
| 圖2 電流模式控制 |
考量斜率補償設計問題
與多數類比電流模式PWM控制器設計相關的問題是控制器只能測量峰值電流。而真正需要的是平均電流的測量值,因為該電流值與輸出電容一起決定所需的輸出電壓。
通常,設計人員可以將平均電流估計為峰值電流的一半。當工作週期(Duty Cycle)小於50%時,電感電流有足夠時間在下個PWM週期開始前衰減到0。只要在PWM週期結束前電感電流能達到0,平均電流就將等於峰值電感電流的一半(圖3)。
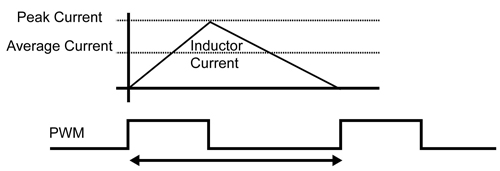 |
| 圖3 PWM週期(工作週期小於50%時,平均電流約為峰值電流的一半) |
在一般情況下,這樣的估計相當準確。然而,當工作週期大於50%時,即會突顯某些問題:平均電流不再約等於峰值電流的一半(圖4)。
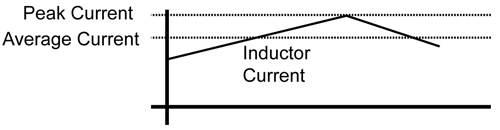 |
| 圖4 PWM週期(工作週期大於50%時,平均電流大於峰值電流的一半) |
隨著PWM工作週期增加並超過50%,平均電流越來越大於用測量峰值電流推算的值。所得到的輸出電壓將高於所需的值並持續上升,直到較慢的電壓控制迴路重新調節電流設定點(Current-set Point),方能將輸出電壓降至所需電位之下。這個過程稱為「二次諧波振盪(Sub-cycle Oscillation)」,將會一再重複。
為解決電流模式的穩定性問題,因此針對類比電流模式控制器開發出名為「斜率補償(Slope Compensation)」的技術。透過為電壓誤差放大器產生的臨界電流(Current Threshold)增加 下緣鋸齒波電壓(Falling-edge Saw Tooth Waveform Voltage)(圖5),產生新的臨界電流,協助電流限制比較器能夠更緊密地追蹤平均電感電流。
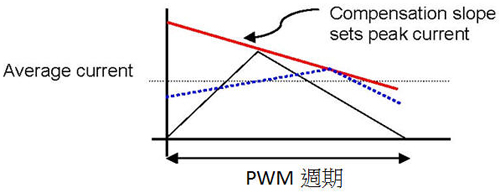 |
| 圖5 斜率補償 |
深究數位電流模式控制
SMPS中的電流模式控制非常重要,提供許多功能如電晶體峰值電流保護、磁性元件中磁場「棘輪效應(Ratcheting)」的消除、抑制輸入電壓的變化和便利的控制迴路補償等。
此外,改採電流模式還帶來另一個好處,即用誤差電壓控制最大電感電流,將電感變成電壓控制的電流源。作為電流源,電感不會在控制迴路的頻率回應中產生極點。這將迴路從隨時可能不穩定的情況下變得較為穩定,使得迴路濾波器的設計容易許多。
儘管電流模式造就出性能優越的系統,但某些數位SMPS的設計仍採用電壓模式控制,則是為了配合其監控電流反饋的方法以及實現所需採樣速率。
以一個11位元PWM解析度的500kHz系統為例,若使用電壓模式配置,PWM解析度將把脈衝工作週期限制在大約0.05%(100%/2,048)。
電流控制透過連續使用ADC測量PWM週期內的電感電流,歸納出電感電流達到所需水準的時間。以PWM工作週期解析度為目標,要達到相同的控制水準,須在每個PWM脈衝轉換二千零四十八次,因此ADC的採樣率必須達到每秒十億次採樣。要收集這十億次轉換,將每一次轉換與誤差訊號比較,然後在達到所需的電流時關閉PWM輸出,需要足夠的處理能力;因此意味著需要每秒至少可執行十億道指令(BIPS)的處理器。很顯然地,採用電流控制並不能以較低的成本解決問題。
DSC簡化SMPS電流模式控制設計
DSC簡化SMPS電流模式控制設計
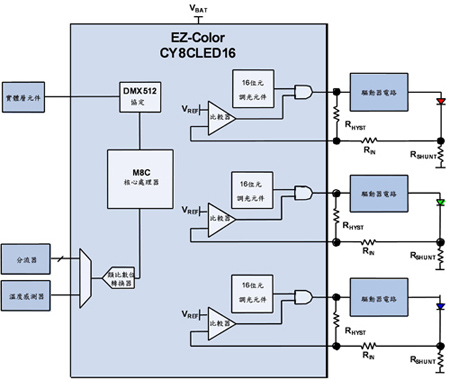
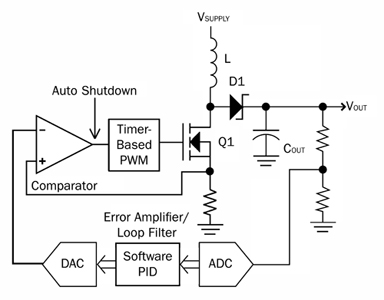
可以使用帶有電源轉換功能的DSC,在數位SMPS設計中實現電流模式控制。舉例而言,設計人員可使用內建的PWM周邊、工作方式與電流模式PWM產生器相同的DSC(圖6)。
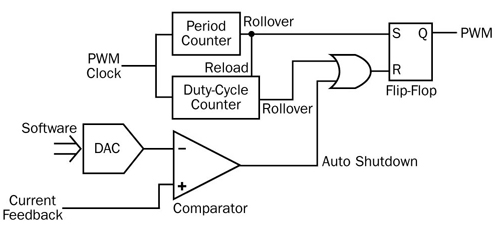 |
| 圖6 具有自動關閉功能、基底技術器的PWM |
圖6描繪了將兩個混合訊號元件(一個電壓比較器與一個數位類比轉換器)添加到一般基底計時器的PWM周邊。電壓比較器向PWM模組提供關閉訊號,但PWM模組的開關還受控於工作週期計數器的輸出。當工作週期計數器達到0,比較器的輸出可接著將PWM的輸出驅動至0。
DAC從DSC接收其輸入,產生要作為比較器其中一個輸入的參考訊號。如果設計人員將該系統包含在SMPS中,PWM模組的計數器將啟動PWM脈衝,DAC將在比較器的反相輸入端產生一個代表所需電感電流的電壓。此外,反饋電流還將流入比較器的同相輸入端。
隨著電感中電流的增強,工作週期計數器持續向上遞增。如果電感電流先達到所需的水準,比較器將終止脈衝,電感開始向輸出電容放電。如果PWM計數器先達到指定的工作週期值,它會終止PWM脈衝。總之,該電路提供兩方面的優勢:毋需高MIPS處理器、即可以電流模式快速反饋,以及設定最高工作週期以限流的功能。
在系統工作前,首先須確定SMPS需要的PWM頻率和最高工作週期。用這些參數設定PWM計數器。接下來,將參考DAC的輸出調節至預期中電流反饋訊號的最大範圍,這樣就能夠在控制PWM工作週期時提供最高的解析度。
最後,設計PID軟體程式,它會接收來自ADC的電壓反饋,將它和內部數位參考電壓作比較,適當過濾以維護其穩定性,然後將所需電流設定輸出到產生比較器參考電壓的DAC(圖7)。
 |
| 圖7 數位電流模式控制 |
工作週期大於50%時,可能會發生電流模式穩定性的問題,可利用PID軟體輕鬆解決。該軟體會設定所需電流,因此毋須調節DAC值,也就是說,利用數位方法比起透過類比技術容易得多;毋須與PWM脈衝同步的斜波產生器以及將斜波增加到反饋電流上的求和連接點(Summing Junction)即可實現斜率補償。
接著是一個簡單的電流模式SMPS系統,利用較便宜的低MIPS DSC完成1~2BIPS處理器的任務。
由於處理器只須在下個脈衝開始前計算新的所需電流,因此處理器有足夠時間完成其他任務,如通訊、系統監控以及軟啟動/啟動程序(Power-up Sequencing)、故障檢測和恢復之類的決定性功能。
可以利用微芯(Microchip)的SMPS和數位電源轉換系列的DSC來完成以上的設計,例如dsPIC30F202X,其配備高解析度數位PWM產生器、一個額定每秒兩百萬次採樣的ADC、帶有相關的10位元參考DAC的高速類比比較器以及支援高效能30MIPS DSP的控制器。
設計SMPS須留意PWM周邊
電源的規格決定應用中所要使用的拓撲結構。不同的拓撲結構意味著必須具有相對較多的PWM模式,包括標準、互補、推挽式(Push-pull)、多相、變相、電流重設及電流限制模式。
電源設計人員必須正確理解「PWM解析度」的含義。如果PWM模組解析度不足,控制系統(硬體或軟體)會讓PWM輸出上下抖動,以達到所需的平均輸出。
在電源應用中,PWM抖動會造成漣波電流(Ripple Current),導致控制進入一種不適宜的工作模式,稱為「極限迴圈(Limit Cycling)」。選擇足夠PWM解析度的DSC以滿足系統要求,避免進入「極限迴圈」的工作模式,對於電源設計人員來說非常重要。
從電壓採樣和電流測量到PWM在控制迴路中輸出新的工作週期值之間的時間稱為延遲(Latency)。隨著延遲縮短,控制迴路變得更為穩定,回應也更快。部分DSC的PWM模組只能在完整的PWM週期結束時接收新工作週期資料。從利用軟體計算新工作週期值到PWM模組接受資料之間的時間差增加了控制迴路的延遲,降低其穩定性。因此,最好使用配備PWM模組的DSC,以立即接受和處理新的工作週期資料。
須有獨立取樣/保持電路ADC
須有獨立取樣/保持電路ADC
在使用DSC設計智慧電源的時候,需要一個能將系統狀態反饋至控制迴路的晶片上的ADC。傳統ADC設計假設ADC的值是以分組的形式收集和處理,像是應用在音頻處理和工業控制系統中的ADC。然而,分組採樣將會導致處理器負載達到高峰,增加控制迴路的延遲。
SMPS電路中經常發生所要採樣和轉換的類比訊號不存在或不夠大的狀況,訊號只有在PWM週期的特定點才有效。因此,標準的ADC模組可能會因為採樣時間不準確而錯過需要的資料。SMPS中需要的就是提供獨立取樣/保持電路(Sample-and-hold Circuit)的ADC模組,協助DSC在特定的時間點監控電壓或電流,讓事件暫態訊號(Event Transitory Signal)的採樣成為可能,並節省系統成本。
更妙的是,有一個可非同步採樣的板上ADC,電源因而能夠支援工作於不同頻率的多個控制迴路,其範例應用包括功率因數校正(70kHz)和DC-DC電源轉換(250kHz)。
類比比較器改善數位SMPS設計
由於ADC不能連續監控訊號,採樣的處理速度最高只能達到板上ADC的額定採用速率,單位為每秒百萬次採樣(MSPS)。有些DSC配備類比比較器,能釋出處理器和ADC去執行其他重要任務。例如,類比比較器可以像傳統線性電源控制器一樣透過直接控制PWM工作週期的方式進行電流控制。除此之外,類比比較器也可獨立監控電壓或電流過高的情況。
假定電源轉換DSC上的參考DAC和類比比較器能實現從電流量測到PWM更新之間大約25奈秒(ns)的延遲。在一般情況下,從感應到類比電壓到利用比較器修改PWM輸出之間的時間大約是25奈秒。此一回應時間低於使用通用DSC晶片上的ADC和處理器進行「輪詢(Polling)」所花的時間,同時根據條件變化修改PWM輸出。
事實上,電源轉換DSC上的參考DAC和類比比較器可幫助實現電流模式控制所必需、逐週期的限流。
PID演算法可控制PWM工作週期
在電壓和電流模式控制迴路中使用PID演算法時,將實際輸出電壓與所需輸出電壓的比例、積分和微分誤差結合起來,即可控制PWM工作週期。
處理DSC中類似DSP的架構並不一定需要複雜的DSP程式撰寫技巧。尤其是針對在熟悉的微控制器程式撰寫環境中、提供DSP功能的某些DSC,如上述的dsPIC(請參考圖8列出的範例程式清單)。
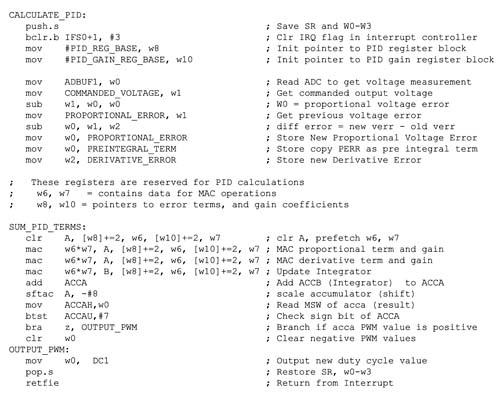 |
| 圖8 範例程式清單 |
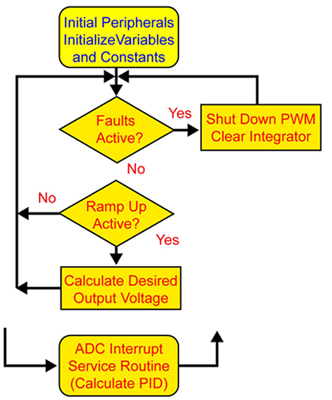
如圖9所示,PID控制迴路是控制軟體的核心。儘管該軟體通常很小,但執行速度很快,經常可以達到每秒重複數十萬次的速率。如此高的重複速率(Iteration),使得軟體設計必須盡可能地高效,以達到最佳性能。使用組譯器(Assembler)是確保程式碼壓縮的好方法。
 |
| 圖9 控制軟體結構 |
此外,PID控制迴路可由ADC按照固定時間中斷。任何可在閒置迴路中執行的系統功能都應如此,例如上升/下降電壓改變、誤差檢測(Error Detection)、前饋計算(Feed-forward Calculation)和通訊支援工作(Communication-support Routine)等功能可在閒置迴路中處理,以減輕對PID控制軟體不必要的負荷。
SMPS軟體將由ADC中斷導向的PID迴路負責其時限要求最為緊迫的部分,從而實現控制演算法。因此,作為一條基本原則,PID軟體占用處理器頻寬的比例不得超過66%,以便釋出資源給在閒置迴路中執行的軟體。
假定本例中PID迴路(由三十道指令組成)的執行速率為30MIPS,則執行時間約為1微秒(μs);如果重複速率為500kHz(2微秒),則PID的工作將占用約一半可用處理器的頻寬,即15MIPS。
圖8的程式片段說明了數位模式降壓轉換器的PID控制迴路。即使對大多數SMPS拓撲結構,PID軟體保持不變,但設計人員可能要更改周邊模組的初始化程式。
選擇適當架構即能客製化
時至今日,技術發展讓電源設計人員能夠利用數位迴路控制,輕鬆地為應用加入新功能。藉著選擇適當的架構如DSC,設計人員毋需複雜的DSP程式撰寫技巧也能為客戶進行客製化的設計。而DSC使用易於操作的晶片上的類比周邊元件和軟體,協助設計人員快速、低成本地將更多智慧化功能融入其電源設計。
在電源設計中融入更多智慧化功能,減輕設計人員的工作負擔,使其能夠更加專注於創新和開發各種拓撲結構。且加強的客製化功能,只須透過韌體而非硬體,即可對設計進行修改。最後,也更好地保護了設計人員的智慧財產權。
(本文作者任職於微芯)